Apple has been granted a patent (number 11520041) for “correcting depth estimates derived from image data using acoustic information.” IT apparently involves a virtual reality/augmented reality headset that can determine distances via bat-like sonar features.
Bats are equipped with echolocation capabilities. Echolocation occurs when an animal emits a sound wave that bounces off an object, returning an echo that provides information about the object’s distance and size.
About the patent
The patent involves mapping real-world environments, and in particular to improving depth estimation in real-world world environments. Various computer applications, such as computer-generated reality (CGR) applications and robotic applications, map real-world environments.
Mapping real-world environments often includes depth estimation, which includes determining a distance to a surface or an object from a particular origin. However, Apple says that existing applications continue to face challenges with accurate depth estimations when mapping real-world environments.
Apple thinks that one solution is devices, systems, and methods for correcting depth estimations derived from image data using acoustic information.
About the RealityPro
When it comes to the Reality Pro, the rumors are abundant. Such a device will arrive in 2023. Or 2024. Or 2025, Or 2026. It will be a head-mounted display. Or may have a design like “normal” glasses. Or it may be eventually be available in both. The Reality Pro may or may not have to be tethered to an iPhone to work. Other rumors say that it could have a custom-build Apple chip and a dedicated operating system dubbed “rOS” for “reality operating system.”
Summary of the patent
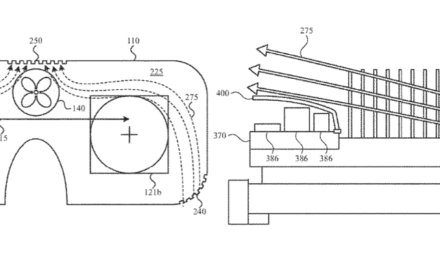
Here’s Apple’s abstract of the patent: “In one implementation, a method includes: obtaining a first depth estimation characterizing a distance between the device and a surface in a real-world environment, wherein the first depth estimation is derived from image data including a representation of the surface; receiving, using the audio transceiver, an acoustic reflection of an acoustic wave, wherein the acoustic wave is transmitted in a known direction relative to the device; and determining a second depth estimation based on the acoustic reflection, wherein the second depth estimation characterizes the distance between the device and the surface in the real-world environment; and determining a confirmed depth estimation characterizing the distance between the device and the surface based on resolving any mismatch between the first depth estimation and the second depth estimation.”
Article provided with permission from AppleWorld.Today